[CV] Computer Vision(1-2): Image Processing - Neighborhood operator
👓Computer Vision 정리
Neighborhood operator
- Neighborhood operator: pixel value computed using a collection of pixel values in a small neighborhood
Linear filter: a pixel’s value is a weighted sum of pixel values within a small neighborhood
- Correlation and convolution operators
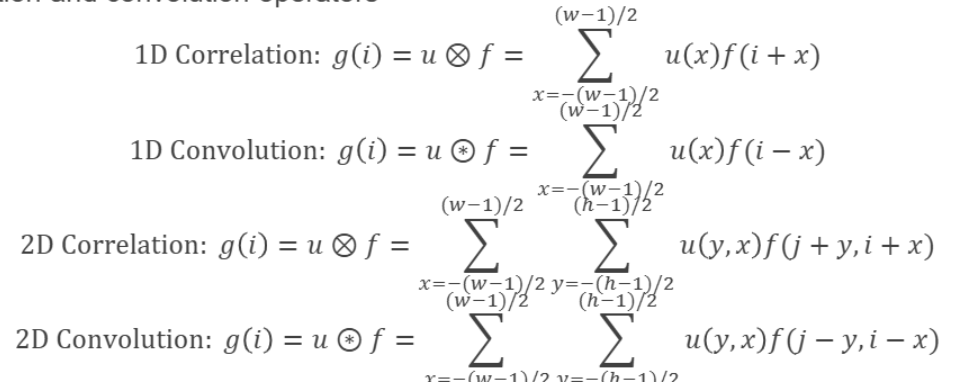
1D Example
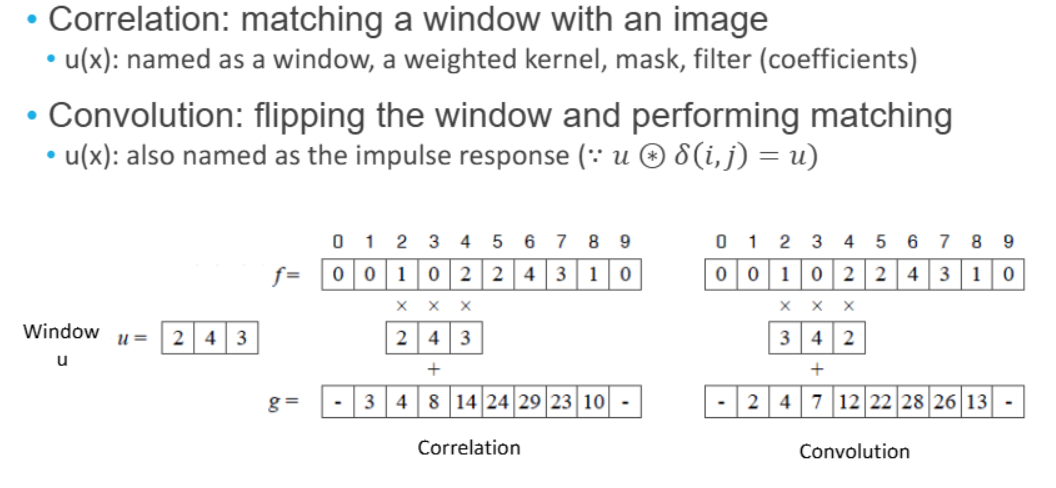
이미지 f에 필터 u를 적용함
Correlation: 그대로 곱해서 더함
Convolution: 필터를 뒤집어서 곱함
2D Exmaple
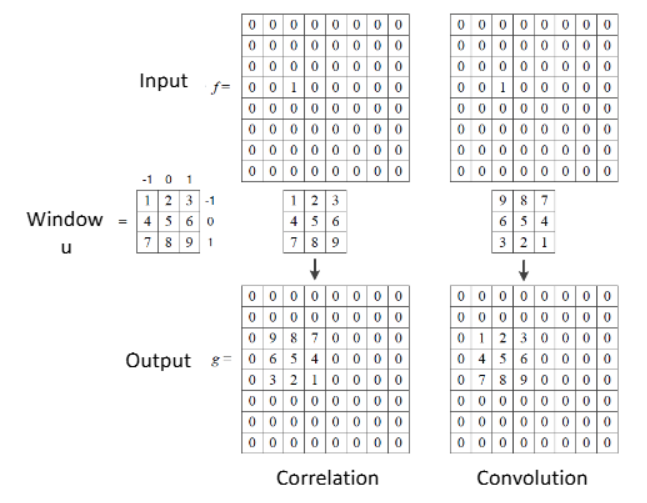
Convolution: 필터를 뒤집음 → 원래 입력과 같은 모양 출력
Correlation: 필터를 그대로 사용 → 출력에서 필터가 반영되어 보임
Properties of Convolution(Correlation)
Correlation and convolution은 linear shift Invariant를 공통 성질로 가진다
- LSI(Linear Shift Invariant): 선형 & 이동 불변
- linearity:
$u(f_0+f1_)=uf_0+uf_1$ - shift-invariance(이동 불변성):
- 입력 이동하면 출력도 똑같이 이동함
- linearity:

수식 형태 The shift invariance principle: 한 픽셀씩 적용한 경우나 전체적으로 적용한 경우의 픽셀이 같다
- Correlation and convolution can be written as a matrix-vector multiplication: g = Uf
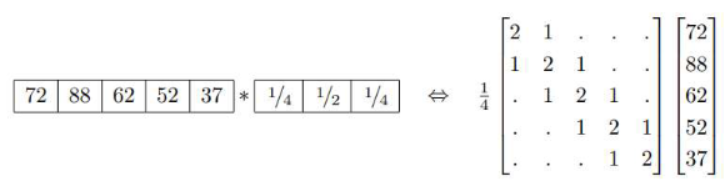
1차원 5pixel convolution 경우는 5 by 5 행렬로 표현 가능
Separable Filtering
- 2차원일 경우 $K^2$ operations per pixel을 하게 된다
- 좀 더 효율적으로 계산할 수 있나?
- filter의 shape을 (MxN) matrics처럼 표현할 수 있다 → 그걸
(mx1),(1xn)으로 행렬을 seperate해서 각각K operation을 하면 된다(2K)- 행렬을 seperate한다는 의미는 2개의 1D 필터로 분해한다는 뜻
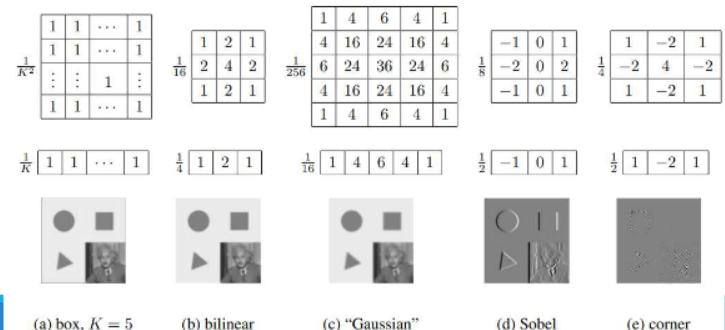
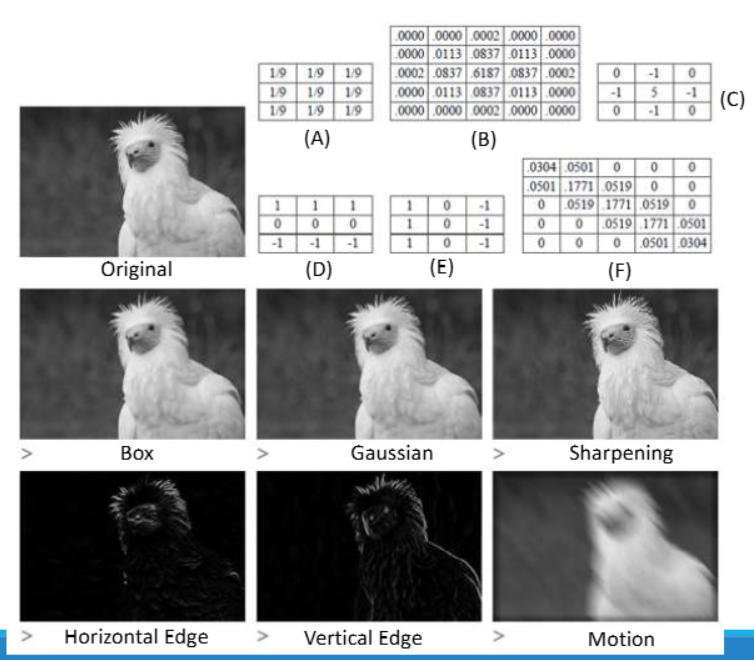
- Box filter(moving average filter): averages the pixels in a K x K window
- Bilinear filter(Bartlett filter): smooths image with a piecewise “tent” function
- 중간에 큰 가중치를 주고 싶을 때 사용
- Gaussian filter: made by convolving the linear tent function with itself(중심 강조, 노이즈 제거)
- 중간에 가장 큰 가중치를 주고 주변으로 갈수록 작게 적용
- Sobel filter: simple 3x3 edge extractor(combination of horizontal central difference and a vertical tent filter)
- 1~3번째는 noise를 없애기 위한 filter라면, sobel은 그림에서 엣지(feature)를 검출한다.
edge extractor: edge의 값이 변해서 edge가 변함, 예시에서는 오른쪽에서 왼쪽을 빼준다.
- Simple corner detector: look forsimultaneous horizontal/vertical second derivatives (+diagonal edges)
- 수직, 수평의 변화를 filter함
Summed Area Table(Integral Image,적분 영상)
넓은 사각형 영역의 합을 빠르게 구하는 기술
같은 이미지에 다른 크기의 box fliter를 적용해야하는 경우에 적분 영상을 사용하게 된다
- 원래 방식: M×M 영역의 합을 구하려면 $M^2$번 덧셈 필요
- Summed Area Table을 사용하면 항상 4번만에 합 계산 가능
- 빠른
Box Filtering구현 가능
- 빠른

누적합을 구하는 점화식
왼쪽부터 구하고 (2,2)의5를 계산하려면(3+2)+(3+1)-3+5 = 11이 된다.

가운데에 3x3 box filter를 적용하려면
48 - 13 - 14 + 3의 값이 된다. -13을 하면 왼쪽 세로 3,1,5,4가 날라가는 식
Non-Linear Filtering
- Non-linear filters perform better in some applications (E.g. Edge-preserving filtering, removing shot noises)
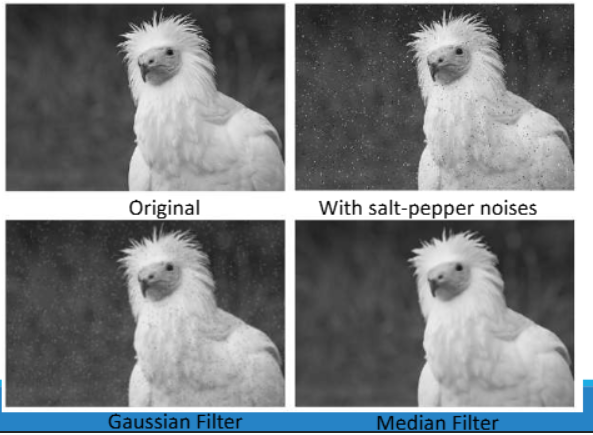
Gaussian Filter(linear): 노이즈는 줄지만 경계도 흐려짐
Median Filter(non-linear): 노이즈는 사라지고 경계는 선명함
Median filter
Median filter: selects the median value from each pixel’s neighborhood
- Can be implemented via linear-time algorithm(줄세우기)
Robust to removing shot noises while preserving edges
- 예시:
1
2
3
4
5
6
3x3 윈도우:
[1 2 1]
[2 4 8]
[3 5 7]
→ 정렬: [1,1,2,2,3,4,5,7,8] → 중간값 = 4
→ salt-pepper 처럼 확 튀는 현상을 배제할 수 있음
Bilateral filter
Bilateral filter: reject pixels whose values differ too much from the central pixel value(in a soft way)
가중치를 중앙 (픽셀에서의 거리 + 색상 값)에 대해서 적용해서 구함

- 가까우면서 → 값이 비슷한 → 픽셀만 살살 섞는다
- 경계는 지키고, 노이즈만 제거할 수 있음