[CV] Computer Vision(2-2): Image Processing - Geometric Transformation
👓Computer Vision 정리
Geometric Transformation
Geometric 개념 정리
주의: 이 슬라이드에 나와있는 점들의 좌표들은 (x-좌표,y-좌표)로 표기되어있음
즉, computer vison에서는 (y,x)로 바꿔야함
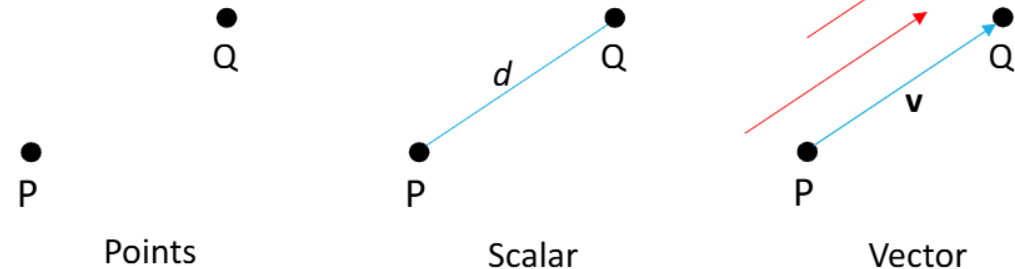
- Scalar: real number (only magnitude), (e.g., distance)
- Vector: direction + magnitude
- Point: a location in space
- 벡터의 합, 곱 등등
- 벡터 + 벡터 = 벡터 / 벡터 * 스칼라 = 벡터
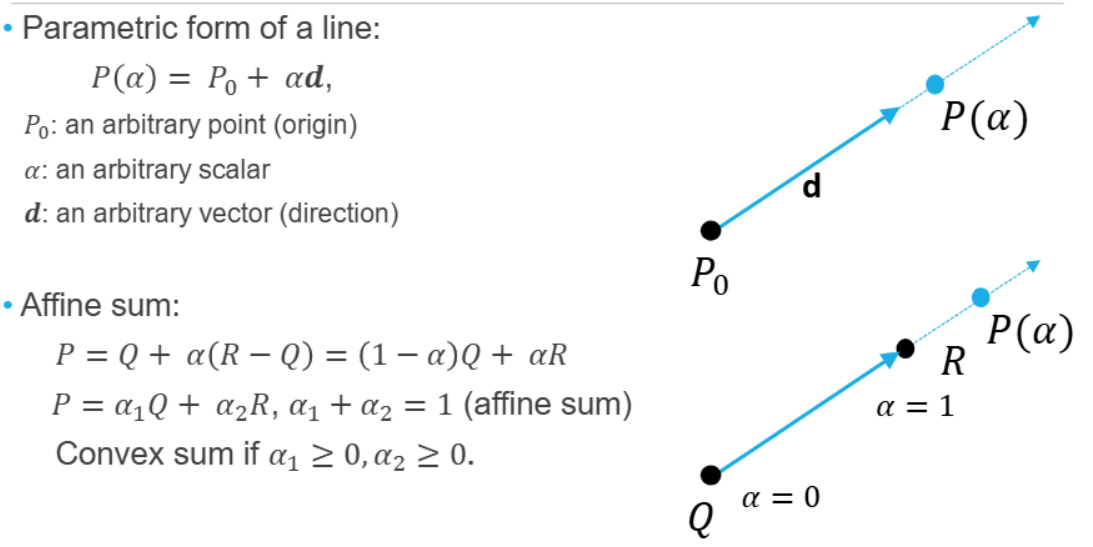
Parametric Form & Affine Sum
Dot Product(내적)
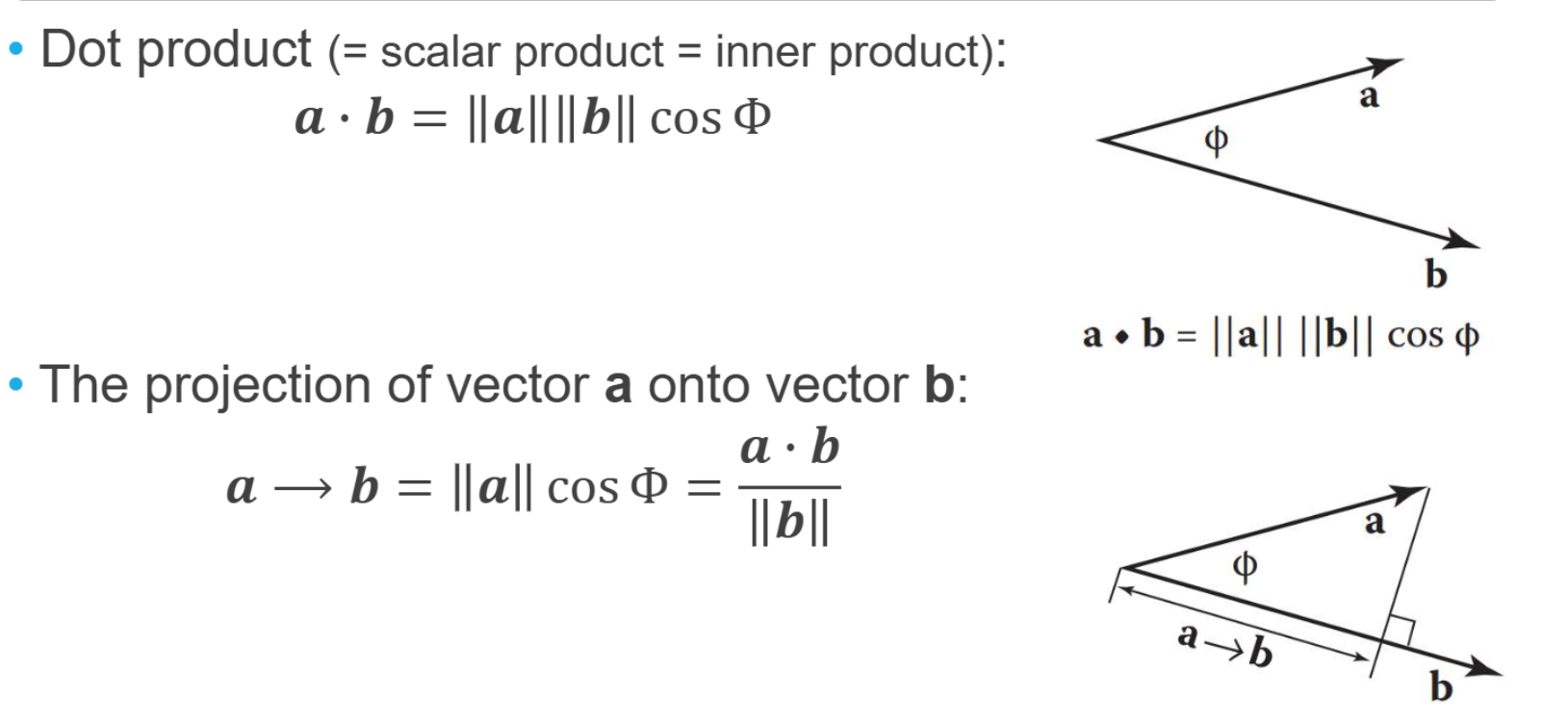
$\vec{a}\cdot\vec{b} = 0$ → 두 벡터 수직
Cross Product(외적)
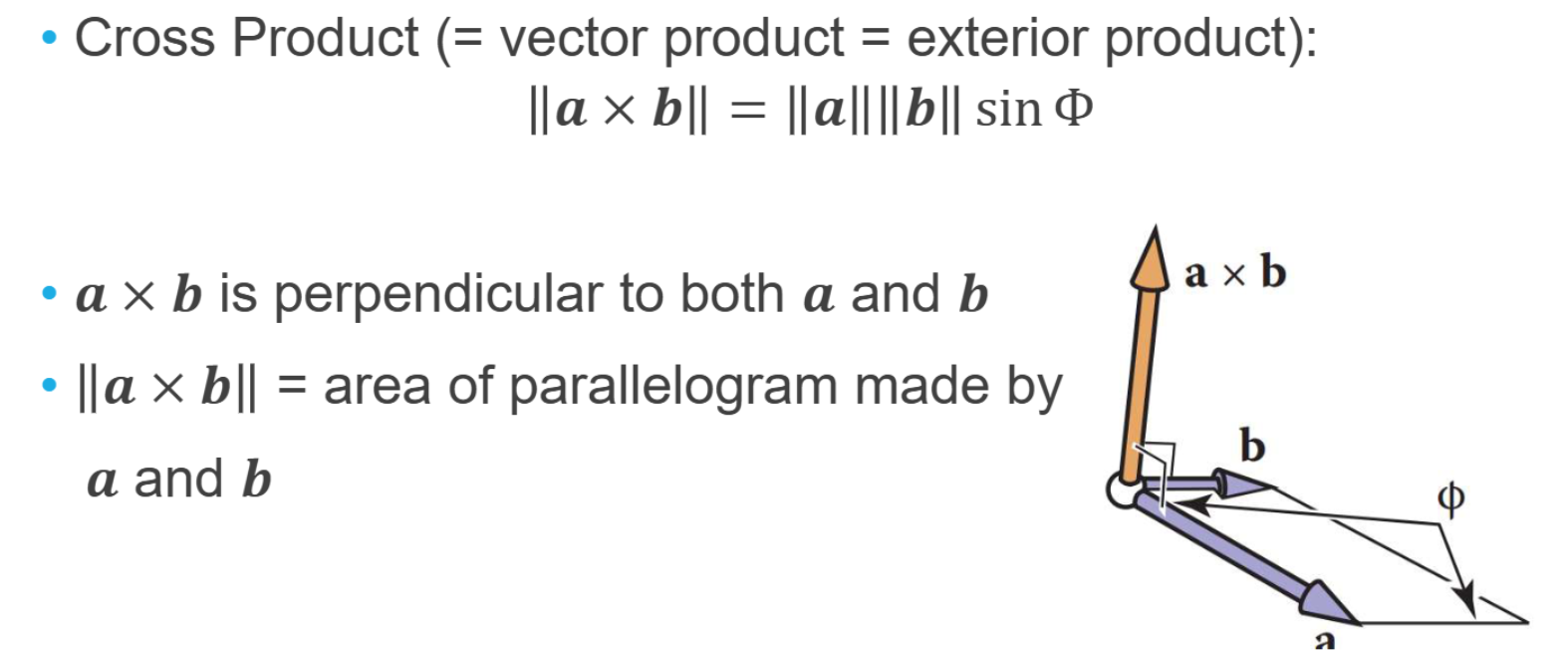
방향: $\vec{a}, \vec{b}$에 모두 수직, 오른손 법칙 따름
결과 벡터 크기(axb): 평행사변형 넓이
2D Geometric Transformation

2차원 포인트는 $(x,y)$ or $x=\begin{bmatrix}x \\ y\end{bmatrix}$로 표현가능
- linear transformation: 어떤 행렬을 이용해 벡터를 변환하는 것
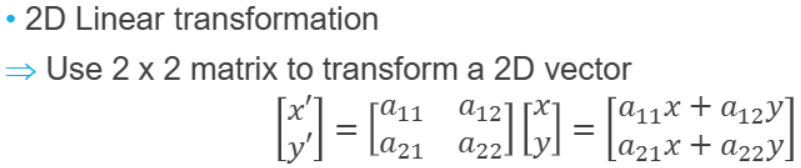
점에서 점으로 가는 mapping을 표현하기 위해 선형 변환을 사용
2차원의 경우 2x2을 이용해 변환
선형 변환 조건:$L(a+b) = L(a) + L(b)$
$L(sa) = sL(a)$
2D Scaling
- Scaling: changes length (and direction)

대각선 방향으로 변경하고자 하는 값을 쓰면 됨
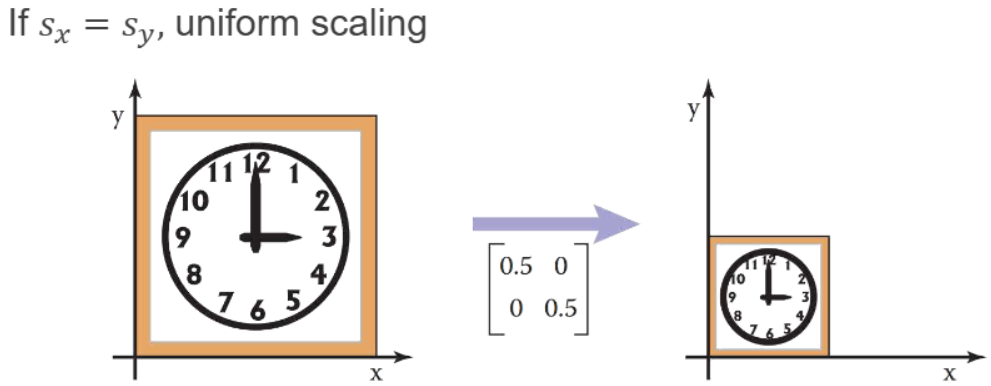
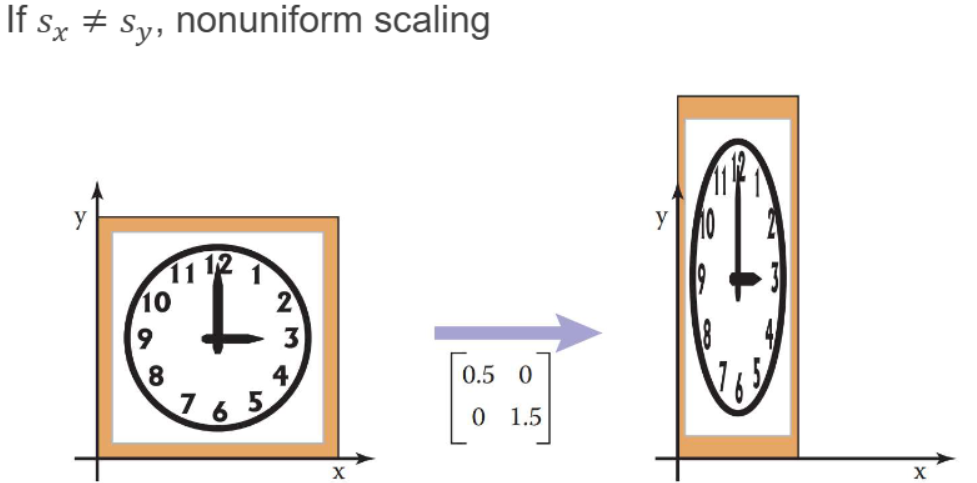
$s_x = s_y$: 균일 스케일링 (uniform scaling) → 모양은 그대로 크기만 변함
$s_x \neq s_y$: 비균일 스케일링 (non-uniform) → 형태가 찌그러질 수 있음
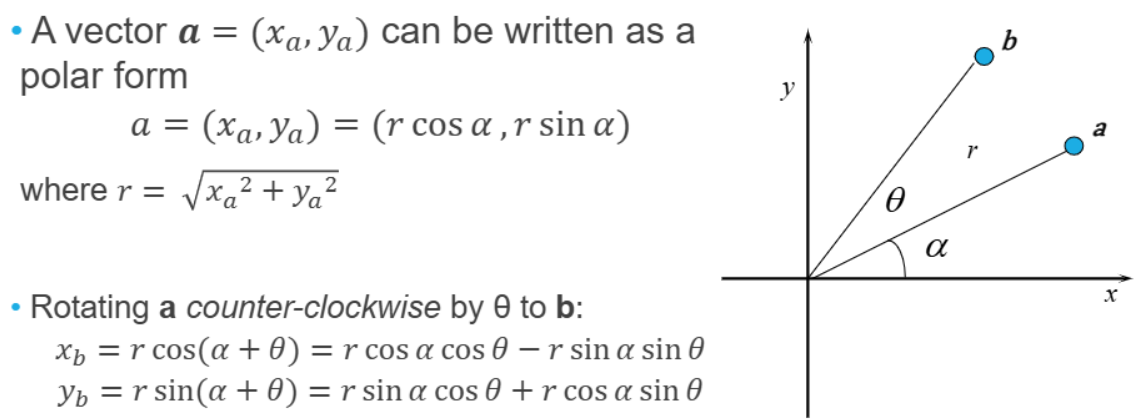
2D Rotation
- Rotation: 벡터를 각도 $\theta$만큼 반시계 방향으로 회전시키는 변환
✅ 벡터 $a=(x_a, y_a)$는 다음 두 가지 방식으로 표현 가능:
- 직교 좌표계(cartesian coordinates): $(x_a, y_a)$
- 극좌표계(polar coordinates): $(r\cos\alpha, r\sin\alpha)$
- $r$은 벡터의 길이: $r = \sqrt{(x_a^2 + y_a^2)}$
- $\alpha$는 x축과 벡터가 이루는 각도
벡터 a를 각도 $\theta$만큼 반시계 방향으로 회전시킨 벡터 b는 다음과 같다:
- $x_b = r\cos(α + \theta) = r\cos α\cos\theta - r\sin α\sin\theta$
- $y_b = r\sin(α + \theta) = r\sin α\cos\theta + r\cos α\sin\theta$
- 이때 $r\cos\alpha = x_a$와 $r\sin\alpha = y_a$이므로
- $x_b = x_a\cos\theta - y_a\sin\theta$
- $y_b = y_a\cos\theta + x_a\sin\theta$
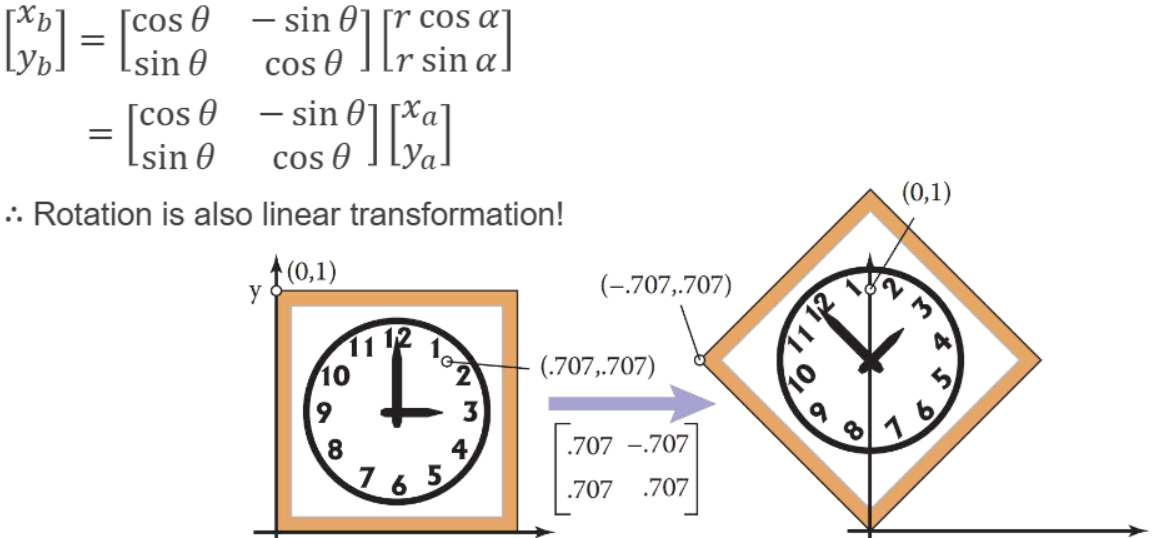
(xb, yb)를
matrix로 나타내면 사진과 같음 2D rotation도 2x2로 계산이 되기 때문에 linear transformation 이다.
✅ Rotation Properties
- Orthogonal matrix(직교 행렬): Two columns (rows) are orthogonal(서로 내접을 했을 때 0이 될때)
- (cos𝜃,sin𝜃)∙−(sin𝜃,cos𝜃)=0
- inverse matrix(역행렬)

R의 역행렬은 (-theta) 를 해주는데 그게 전치행렬과 같다. 즉, 역행렬을 구하기 위해서 그냥 전치행렬($R^T$)을 사용하면 되서 유용함
2D Shear
- Shear: 물체를 한 방향으로 “밀어내는” 변환, 평행사변형 모형으로 변환된다.
X, Y 방향 shear는 다음과 같다:
shear_x(s)= $ \begin{bmatrix} 1 & s \\ 0 & 1 \end{bmatrix}$shear_y(s)= $ \begin{bmatrix} 1 & 0 \\ s & 1 \end{bmatrix}$shear_x(s) 변환이 점 (x,y)에 적용되면 $x’ = x+sy, y’=y$ 즉 y좌표는 변하지 않고, x좌표는 y좌표에 비례하여 이동
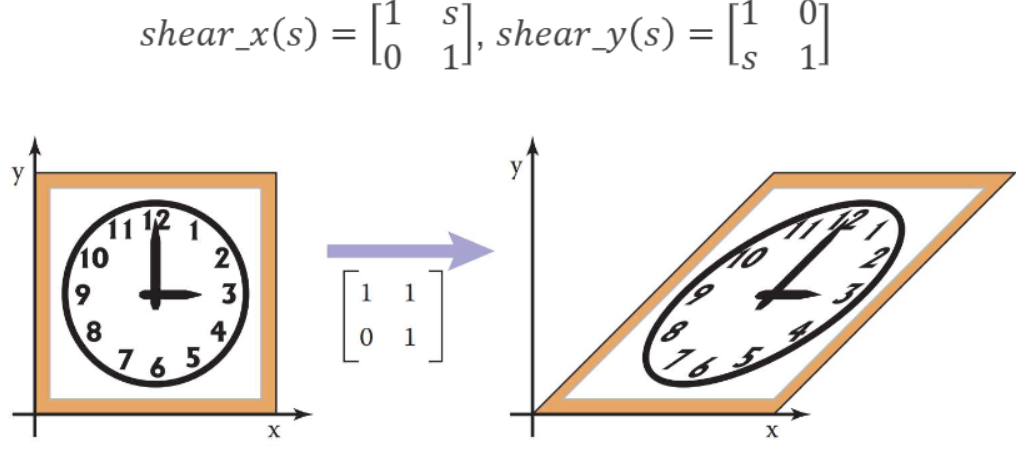
x방향으로 shearing할때의 예시
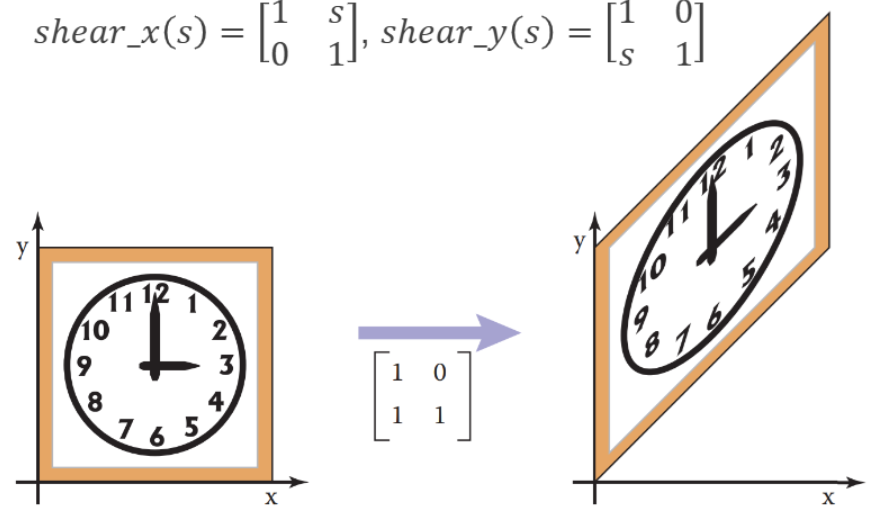
y방향으로 shearing할때의 예시
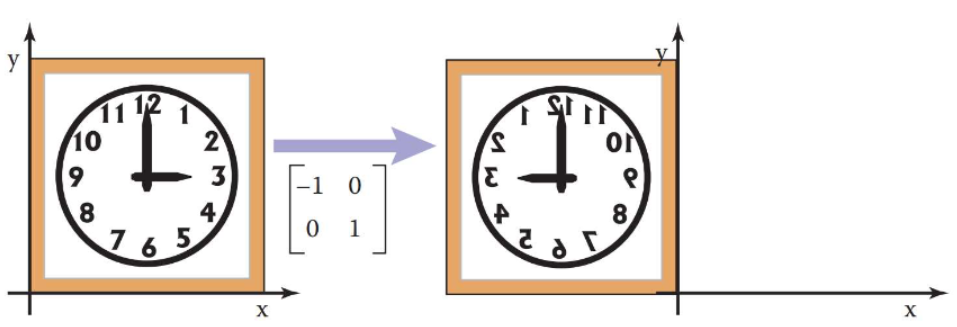
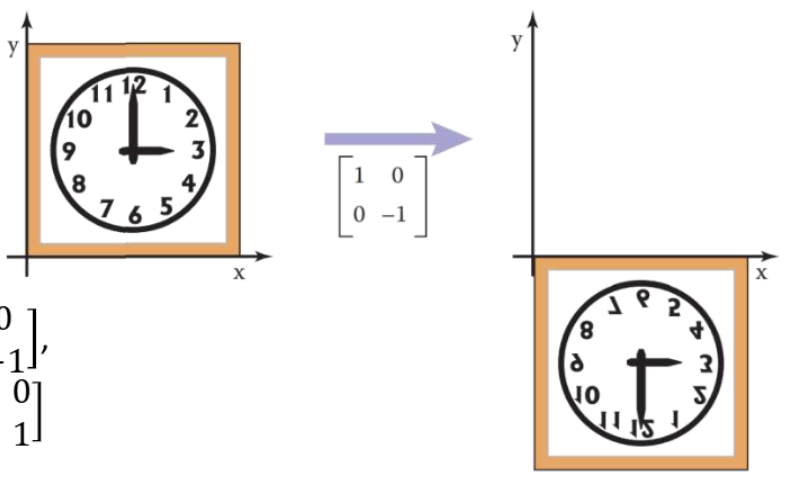
2D Reflection
- Reflection: 좌표 축을 기준으로 물체를 “뒤집는” 변환
X, Y 방향 Reflection는 다음과 같다:
reflect_x= $ \begin{bmatrix} 1 & 0 \\ 0 & -1 \end{bmatrix}$reflect_y= $ \begin{bmatrix} -1 & 0 \\ 0 & 1 \end{bmatrix}$reflect_x 변환이 점 (x,y)에 적용되면 $x’ = x, y’=-y$
즉, y좌표만 부호가 바뀐다
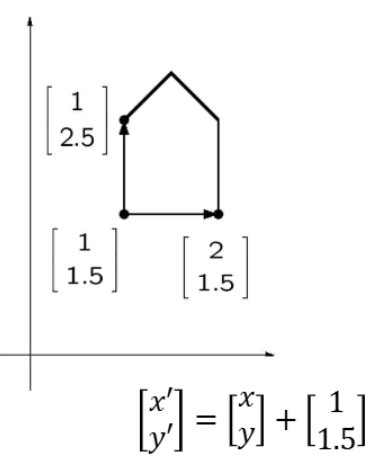
2D Translation
- Translation: 물체의 모든 점을 동일한 거리와 방향으로 이동시키는 변환
이동 변환 수식:
- $x’ = x + x_t$
- $y’ = y + y_t$
$(x_t,y_t)$는 이동 벡터
일반적인 2x2행렬로는 Translation을 나타낼 수 없다!
그럼 어떻게 계산해야하나? → 그래서 나온 이론이 Homogeneous Coordinate
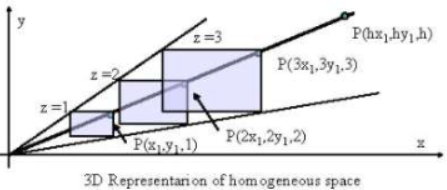
Homogeneous Coordinate
Homogeneous Coordinate(동차 좌표계): 동차 좌표계는 기존의 좌표계를 확정하여, 점,선,면 등을 일관된 방식으로 표현하고 변환할 수 있게 한다.
- 2차원에서 점 $x = (x,y)$는 동차 좌표계에서 다음과 같다.

$\tilde{x}$는 동차 좌표계에서의 점
$\bar{x} = (x,y,1)$은 증강 벡터(augmented vector)
$\tilde{w} \neq {0}$인 모든 $(\tilde{x},\tilde{y},\tilde{w})$는 2D 점 $\tilde{x}/\tilde{w}, \tilde{y}/\tilde{w}$를 나타낸다
즉, 동차 좌표계에서는 (2,3,1), (4,6,2), (6,9,3) 모두 2D 공간에서 같은 점 (2,3)을 나타낸다!
- 만약 $\tilde{x}$ = (x,y,0)(=$\tilde{w}$=0)이면 이 point는 ideal point 또는 point at infinity라고 불린다
- ideal point는 방향을 나타내는데 유용하다
- ideal point는 방향을 나타내는데 유용하다
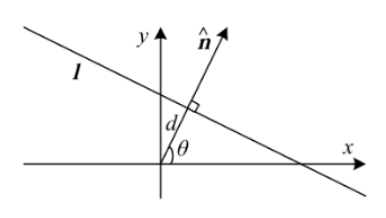
2D Lines
Homogeneous Corrdinate에서 2D line: $\tilde{l} = (a,b,c)$
- 직선의 방정식: $\bar{x}\cdot\tilde{l} = ax + by + c = 0$
- $\tilde{l}$을 정규화:
- $l = (\hat{n}x, \hat{n}y, d) = (\hat{n}, d), \parallel\hat{n}\parallel = 1$
$\hat{n}$: 직선에 수직인 단위 normal vector
$\hat{n} = (\hat{n}x, \hat{n}y) = (\cos\theta, \sin\theta)$
d: 원점에서 직선까지 거리
$(\theta, d)$: 극좌표계
- $l = (\hat{n}x, \hat{n}y, d) = (\hat{n}, d), \parallel\hat{n}\parallel = 1$
- $l$ = (0,0,1): 무한대에 있는 직선으로, 모든 무한대 점들을 포함함
Homogeneous Matrix
- 동차 좌표계에서의 2D 변환은 다음과 같이 변한다
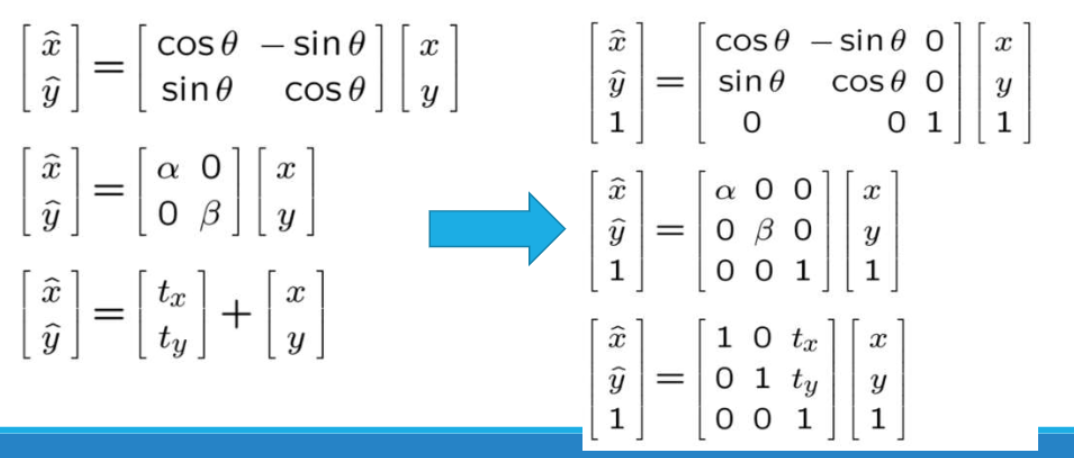
순서대로
Rotation,scale,translation변환
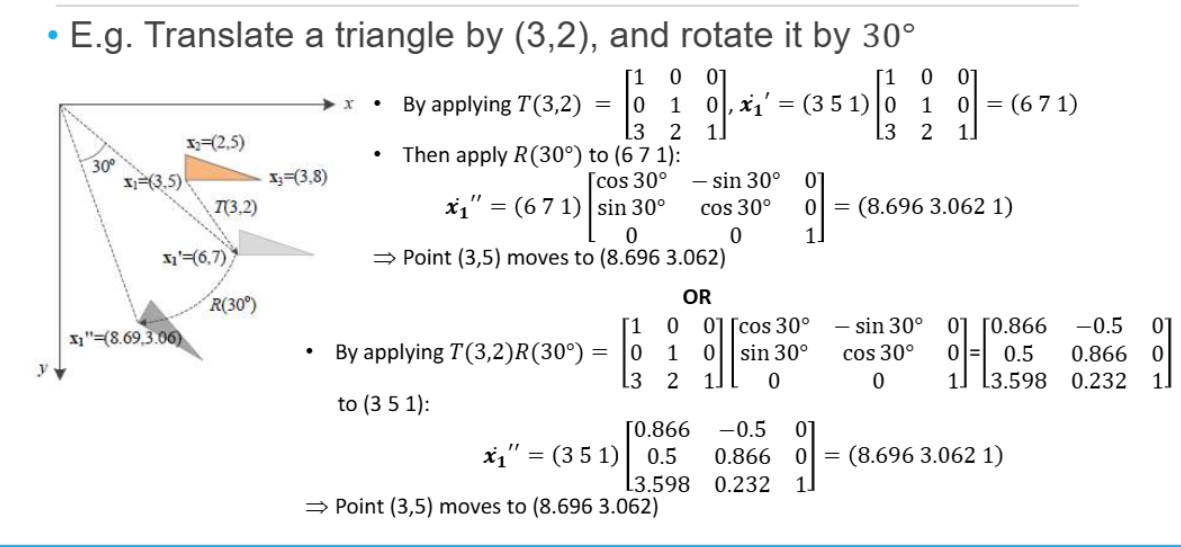
- 여러 변환을 조합하려면 각 변환 행렬을 곱하기만 하면 된다!
행렬을 곱할 때는 적용한 행렬의 반대 순서로 곱해야한다!
- 복합 변환 예시:
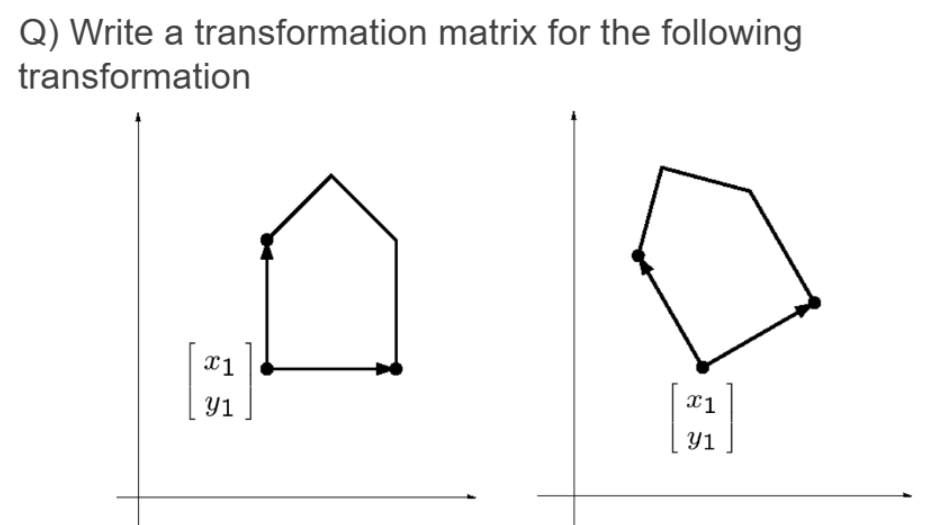
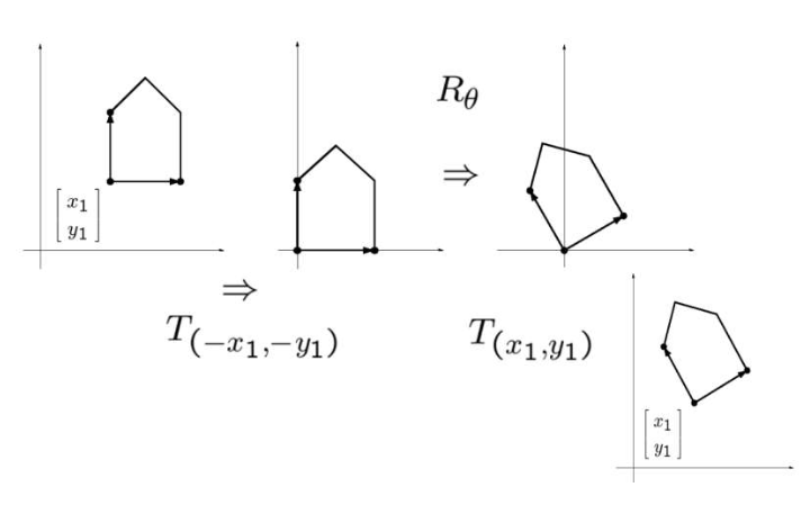
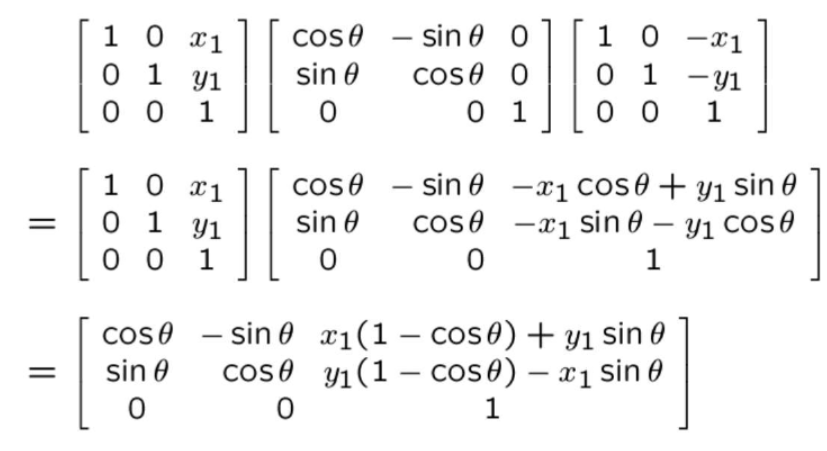
예시에서는 원점으로 이동 → Rotation 변환 → 다시 원래의 위치로 이동이므로
1
T_final = T_translation(원래 위치로 이동) × T_rotation x T_translation(원점 이동)
다시 CV관점으로 돌아와서 (y,x) 좌표계에서의 Homogeneous Matrix는 다음과 같다 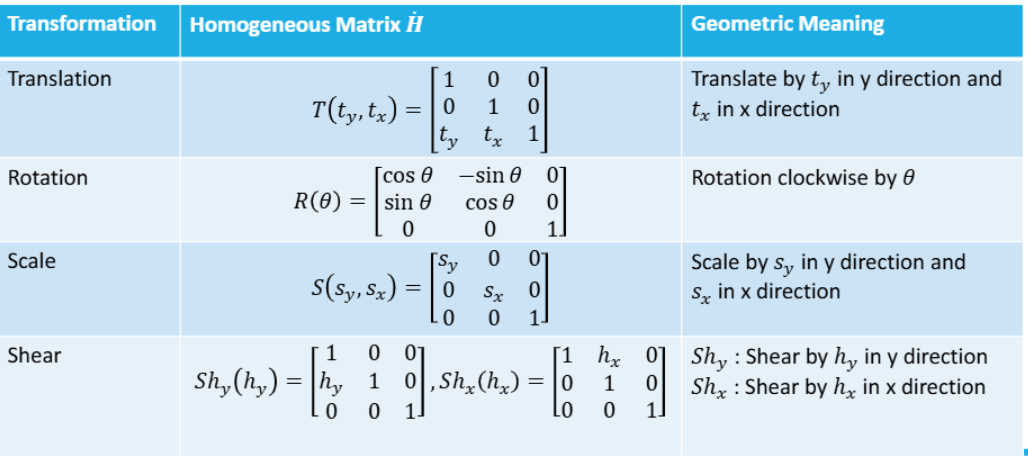
(y,x)좌표계에서의 복합 연산 예시:
2D Transformation의 종류와 특성:
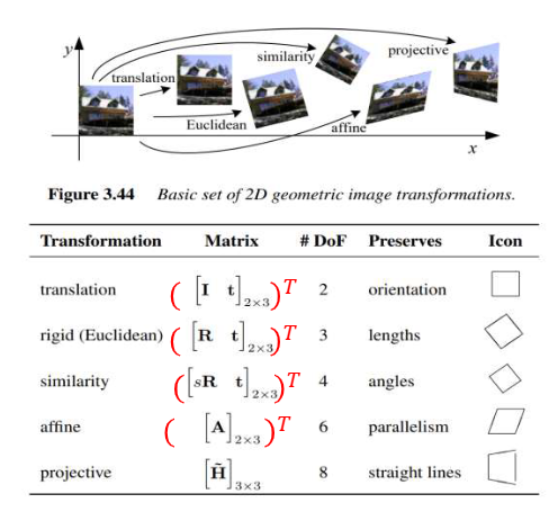
DoF는 자유도(우리가 변환하는 양)
Similarity에서 DoF: 4(스케일 1개, 회전 1개, 이동 2개)
전치행렬 T인 이유는 사진은 (x,y)이기 때문
그럼 이미지에 Geometric Transformation은 어떻게 적용이 되는가?
Geometric Transformation 적용
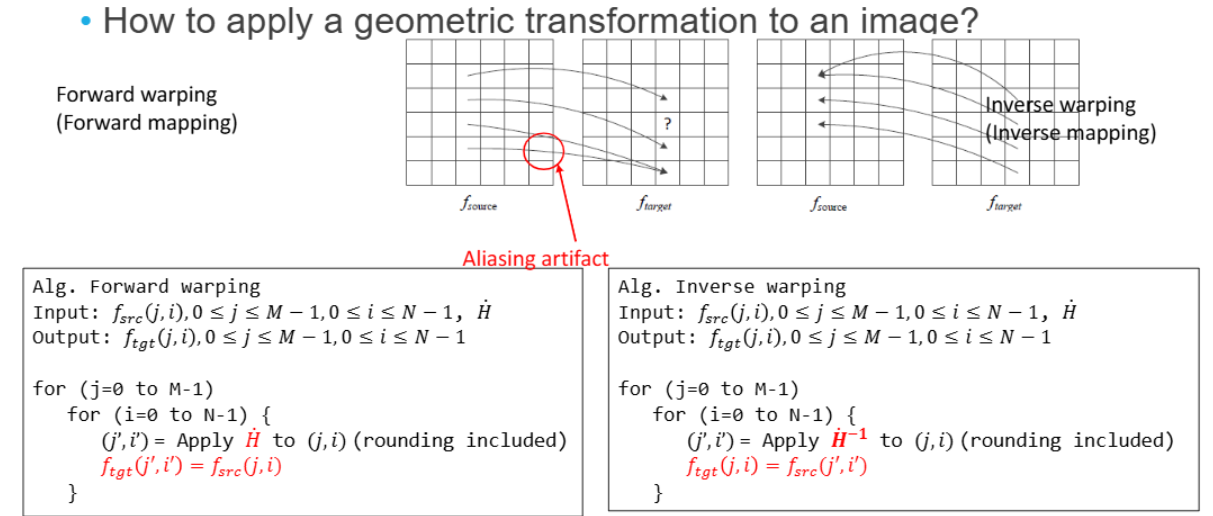
- Foward warping:
- 소스 이미지의 각 픽셀을 변환하여 대상 이미지의 위치로 매핑
- 문제점:
- 앨리어싱(aliasing) 아티팩트가 발생할 수 있다.
- 소스 이미지의 픽셀이 정확히 대상 이미지의 픽셀 격자에 맞지 않을 수 있어 빈 공간(홀)이 생길 수 있다.
- Inverse warping:
- 대상 이미지의 각 픽셀 위치에 대해, 소스 이미지에서 값을 가져온다
- 하지만 여기서도 다른 두 개의 대상 픽셀이 같은 소스 픽셀을 참조하므로 앨리어싱 발생
앨리어싱을 해결하기 위해 Interpolation으로 보완한다
Interpolation
Interpolation: 알려진 데이터 포인트 사이의 중간 값을 추정하는 방법
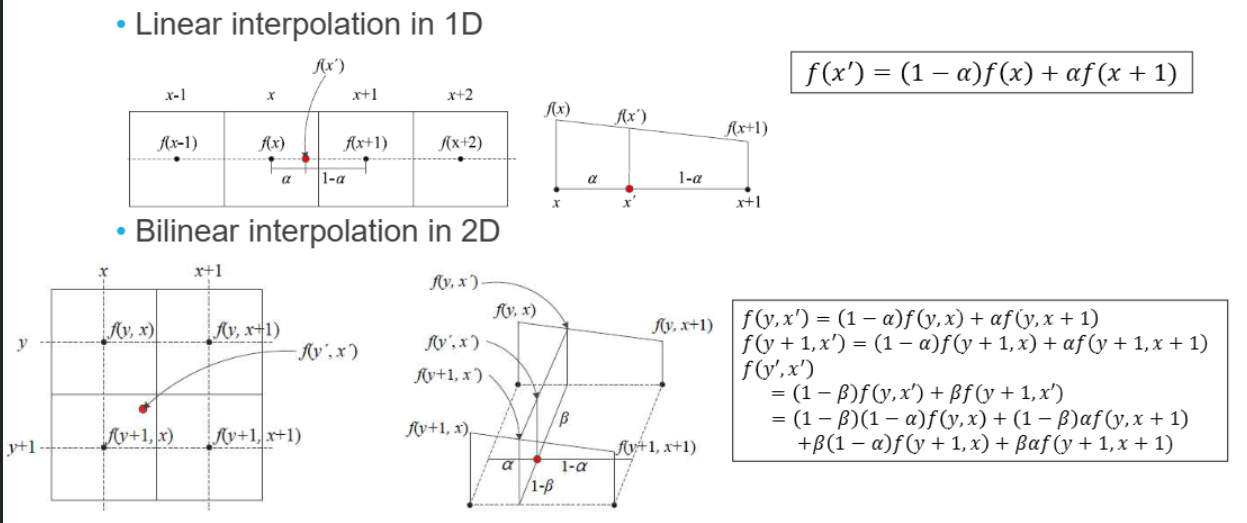
1D Linear Interpolation과 2D Bilinear Interpolation
- 1D Linear Interpolation: 두 개의 알려진 데이터 포인트 사이의 값을 직선으로 근사하여 추정
2D Bilinear Interpolation: 알려진 네 개의 격자점(grid points) 사이의 값을 추정
- lecture 5의 Edge Thinning은 시험 X